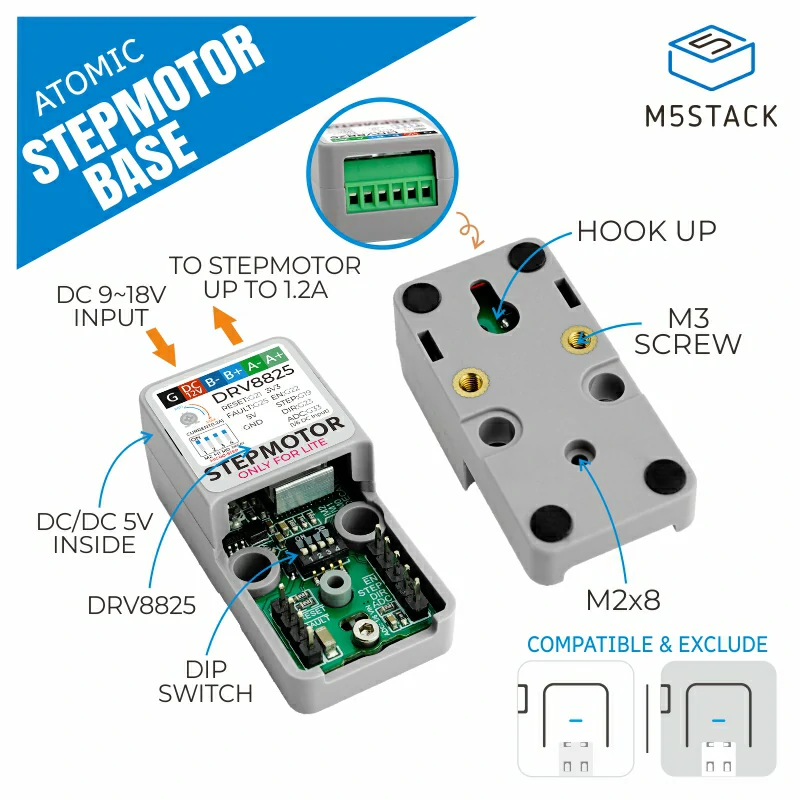
Atomic Stepmotor Base is a stepper motor driver base designed for the ATOM series. It features a built-in DRV8825 driver chip, which can drive stepper motors. By adjusting the variable resistor, it can provide up to 1.2A of driving current, and the chip includes overcurrent protection. The board is equipped with a DIP switch for flexible adjustment of the step subdivision. The built-in DC-DC chip allows the entire unit to be powered by an external power supply (9 ~ 18V) when using a stepper motor. It is suitable for applications such as 3D printers, CNC machines, robots, automation equipment, and camera gimbals.
Features
Built-in DC-DC external power supply for ATOM
Up to 32 subdivisions
Up to 1.2A driving current
Status indicator LED
Compatible with Atom-Lite/ATOMS3/AtomS3-Lite series hosts